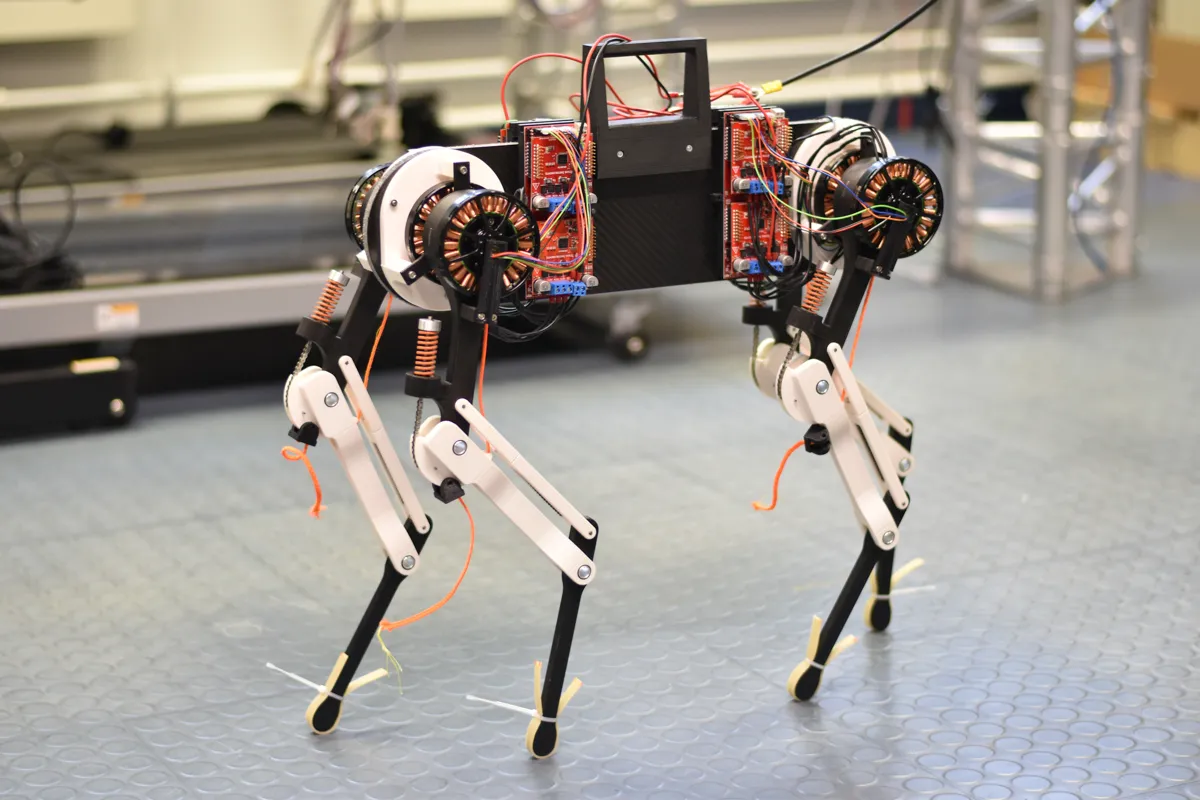
A robot dog named Morti has taught itself to walk, one hour after its first step. The robot learned just like animals in the wild: by tripping and stumbling until it understood how to balance on its limbs.
Morti was developed by researchers at the Max Planck Institute for Intelligent Systems as a way for scientists to closely study how animals learn to walk. With Morti, researchers could measure the forces and torques, and muscle power, of each limb – something that would've been much more difficult to do in a live organism, said Felix Ruppert, a PhD student and first author of the new study.
In building the Labrador-sized robot dog, Ruppert and the team first needed to computerise the mechanism by which animals (and humans) learn to walk.
Walking, like blinking and breathing, are called rhythmic tasks because they use the same muscle movements repeated throughout the activity. Rhythmic tasks aren't co-ordinated in the brain, but are controlled by networks of neurones, collectively called a Central Pattern Generator (CPG).
Our CPG for walking is found in our spinal cord, as this is what controls the muscle contractions in our legs that take us forward, one step at a time.When we trip or stumble over rough terrain, we don't immediately stop walking. This is because the spinal CPG can control our legs' reflexes without needing to check with the brain about how to proceed.
This also means an animal's ability to learn how to walk is located not in the brain, but in the spinal cord. So, Morti had to be given an algorithm that acted like a computerised spinal cord.
"CPGs in nature are networks of nerve cells, while in robotics it can be represented as a set of nodes," said Ruppert. "Morti's CPG nodes are connected to nodes in each leg, so that [triggering one] node creates the back-and-forth oscillation of the limb."
With its basic CPG in place, the researchers put Morti on the treadmill. At this point, Morti had no idea how to walk, nor any way to tell what space it was in or how far to stretch out one leg before putting it down to lift the other. It was as uncoordinated as Bambi.
"In the beginning, the CPG knew nothing about what was optimal for the legs it had," said Ruppert. "[It was] practically ‘born’ knowing nothing about its leg anatomy or how they work.
"But when we added sensors to the robot, the CPG could sense its environment and change the way it swings its legs based on what is happening to its body. Over time it learns to move in a way that leverages the leg mechanics as efficiently as possible, without stumbling."
In just one hour, Morti learned to walk on a treadmill. Of course, there are other walking robots, so this in itself isn't new. But Morti runs on a small group of nodes, while most four-legged robots currently in use have a large, complicated controller that manages its movement. These robot 'brains' require a lot more power: several hundred watts, compared to the five watts powering Morti's walk.
"If we talk about industrial application, battery life is always a bottleneck. So if the computer [in Morti] uses less energy, then a smaller, less energy-hungry computer can be used. The point of our approach is not to replace what is currently used, but to provide additional aspects that could be synergised with the current state of the art technology, to create the next generations of walking robots."
As well as advancing robotics in industry, the team say Morti can help answer many of the questions that researchers have about animal movement.
"What drives learning to walk? What is the best placement of muscles and how long should legs and their segments be? And, more broadly, why are animals so good at locomotion [despite] all the neural delays they have – and why have we not been able to reproduce that performance in our robots?
"Bio-inspired robots [like Morti] are a great tool to understand biomechanics and its unanswered questions.
Read more about robot animals:


