If the thought of a tiny robot crab scuttling around your insides is too much for you, you may want to stop reading. Because, while it's a way off yet, that's one potential use for the world's smallest remote-controlled robot.
A team of engineers at Northwestern University designed the robot version of the peekytoe crab while experimenting with mechanisms to control robots without the need for any onboard electricity or hydraulic parts. Their movement instead relies on a metal alloy that can change shape with heat, but remember its original position to spring back afterwards.
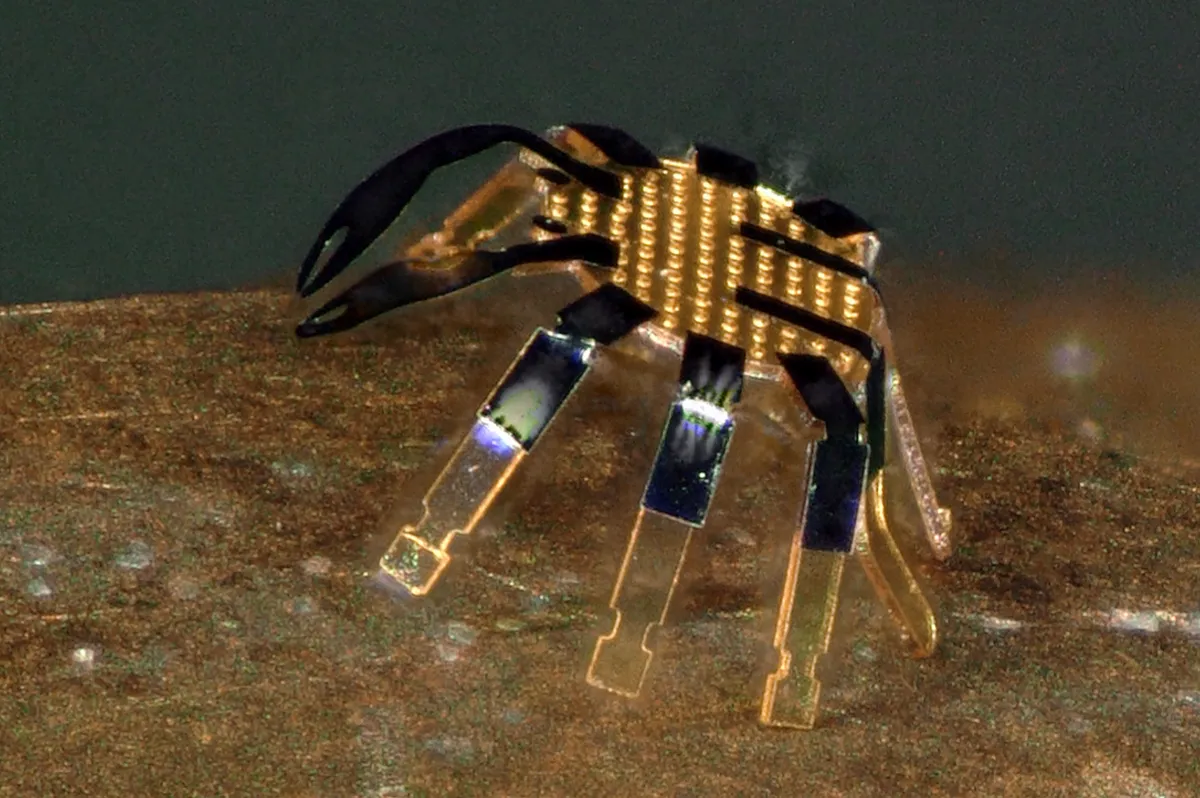
The robots created by engineers Prof John Rogers, Prof Yonggang Huang, and their PhD students, are less than a millimetre wide – small enough to move around arteries and veins in the body in search of blockages, for example. The crab's design began as a flat sheet of a plastic polymer, with the body, legs and chelae (or pincers) cut out. On top of each part they wanted to move, the engineers then lay the metal alloy, shown above in black.
The team then bent the 2D structure into a 3D robot, but its metal joints were able to remember its original flat shape.
"So, now if I come along and I heat up those joints, they will want to go back to that original [flat] plane," said Rogers. "But then, when I stop heating it, the skeleton will move the leg back into that bent geometry. Heating makes the leg go out straight, then cooling puts it down. And if you do that in a coordinated way, you can get the thing to kind of walk around."
To apply heat, the team used a laser beam pointed at each individual joint. The movement of the crab can be controlled
"If you've ever been to a laser light show, you're familiar with all the fancy things you can do by taking a single laser beam and splitting it into a thousand beams," said Rogers.
"I've asked my students to see if next we could make these things fly. Maybe if we flap those legs a little harder, we could make them fly away... That's probably not going to happen any time soon, but I like to challenge my students."
"A more realistic next step would be to integrate radios or electronic circuits into these devices. We make our robots flat, and it's exactly the same as the way Intel makes microprocessors. That's probably more realistic than a robot that flies away," said Rogers.
The tiny crab brings us one step closer to medical robots able to clear clogged arteries from within, or to find and destroy cancerous tumours inside the body. However, it is really only a small step in the right direction, as Rogers said the robots themselves aren't suitable for use in the body.
"Our robots are operating in a terrestrial mode: they're walking on solid surface. But most biomedical applications will probably be in a fluid environment, where you'll need swimmers," he said.
And while these are the tiniest remote-controlled robots the world has seen yet, they're still not small enough to get into every nook and cranny. The crab is ten times bigger than the smallest capillaries in the body, for example.
Despite this, there are many applications waiting to be explored. The half-millimetre size robots could inspire designs that are able to act as miniature repair bots, fixing broken machinery or even build small structures for bigger robots to utilise. As they say – every little helps.
Read more from robotic research:


